Reactive Architecture Advanced
Notes on reactive architecture for microservices
Building Scalable Systems
We should look at how we solve problems in the real world as this will provide us with inspiration for solving software problems
Consistency, Availability, Scalability
- A system is considered scalable if it can meet an increase in demand while remaining responsive
- A system is consistent if all members have the same view or state
- A system remains available if it can continue to respond despite some failure
Performance vs Scalability
- Related but different
- Performance optimizes response time per request
- Scalability optimizes the ability to handle many requests at the same time
To identify what's being measured you can use the following:
- x/second - both
- x at once - scalability
- time per x - performance
Scalability has no theoretical limit whereas performance has a lower limit, when building reactive systems we choose to focus on scalability more than performance
Consistency
In distributed systems a common issue we end up with is two parts of the systems disagreeing on a specific piece of information or state. Ther are a few different ways we can approach resolving this issue:
- Embed additional information/metadata such as a timestep
- Add another observer and make use of a vote
- Always assume a specific observer/node is correct/incorrect
The Problem wit Distributed Systems
- Separated by space
- Physics has an upper limit on speed
- There is a time required to reach consensus
- In this time, state may have changed
Due to the aboce, we end up in a case where the receiver of information is always dealing with stale data. Due to this we focus on using eventual consistency
Eventual Consistency
Eventual consistency gaurantees that, in the absence of new updates, all access to a specific piece of data will eventually return the most recent value
Types of consistency:
- Eventual Consistency
- Causal Consistency
- Sequentually Consistency
- (others)
Monolithic systems are based on Strong Consistency and not eventual
Each of the above models has a set of tradeoffs
Strong Consistency
Strong consistency means that an update to a piece of data needs an agreement from all nodes before it becomes visible
Distributed systems can provide strong consistency
- Physics prevents strong consistency, so we implement mechanisms to simulate it
- Tie a distributed problem to a non-distributed resource
- Can be the source of contention in a distributed system
A lock is a way we can do this, we introduce a non-distributed element to our system and changes must go through the lock
Contention
- Any two things that contend for a resource are in competition
- Others must wait for a winner in contention
- As the number of things in competing increases, the time to free up resources increase
- As load increases, operation time increases
Amdahl's law states that the max improvement gained by parallel processing is limited by contention thereby limiting our overall throughput
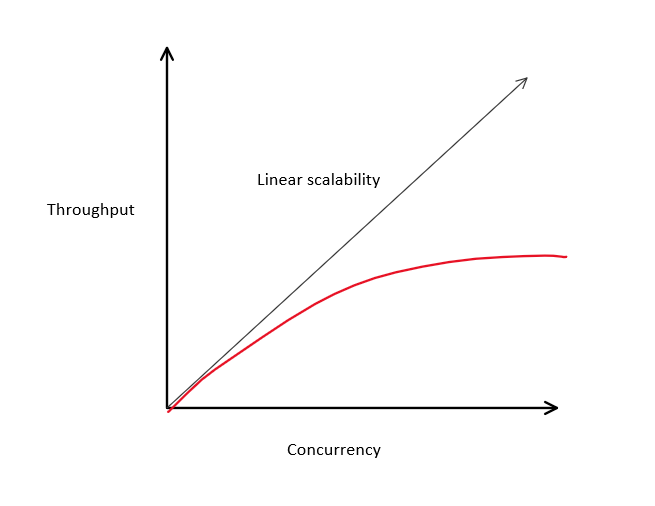
- Improvements are limited to code that can be parallelized
- Contention limits parallelization and therefore reduces improvements
If we keep increasing we may see diminishing returns on parallelization
Effect of Coherency Delay
- In a distributed system, synchronizing state is done using crosstalk or gossip
- Each node in a system sends messages to each other node informing them of any state change
- Cohernecy delay is the amount of time it takes for synchronization to complete
- Increasing the number of nodes increases the coherency delay increases
Gunther's universal scalabiity lay builds on Amdahl's law and states that increasing concurrency can have negative returns due to contention and coherency delay
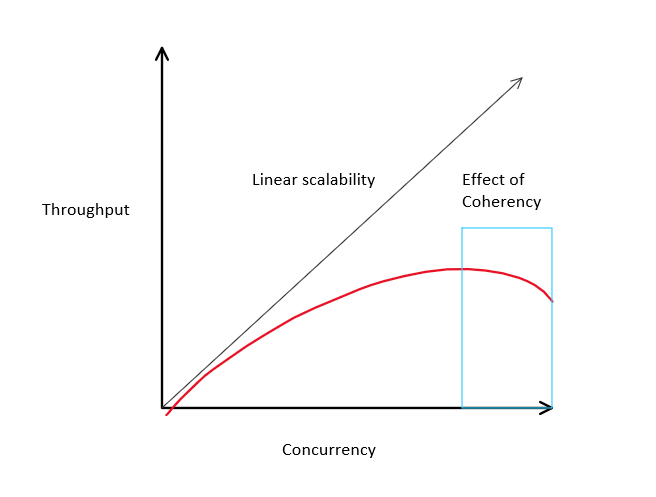
- Accounts for coherency delay
- Coherency delay results in negative returns
- As the system scales up, coordination between nodes exceeds any benefits
Laws of Scalability
-
Amdahl's Law and Gunther's Law show that linear scalability is usually not possible
-
Linear scalability requires statelessness and isolation
-
Reactive systems understand these limitations and try to minimize the impact
-
Reduce contention by:
- Isolate locks
- Elminate transactions
- Avoid blocking operations
-
Mitigate coherency delays:
- Embrace eventual consistency
- Build autonomy
The goal is to reduce things that prevent scalability
CAP Theorem
- Distributed systems must account for this
- A distributed system cannot provide more than two of:
- Consistency
- Availability
- Partition Tolerance
Distributed systems have to pick between CP or AP. For a system to be CA that implies that the system is not distributed as it does not need to be partition tolerant
Partition Tolerance
System continues to operate despite an arbitrary number of messages being dropped by the network
- No distributed system is safe from partitions
- Can occur due to network
- Occur when a node goes down
- Can be short of long-lived
- CAP is about what happens when a partition occurs
Dealing with Partitions
When a partition occurs a distributed system has two options:
- AP - sacrifice consistency, allow wrties to both sides of the partition, when resolved you will need to merge data
- CP - sacrifice availability, disable or terminate one side of the partition, during the partition some or all data will be unavailable